Claude Code 之父 Boris 在红杉 2026 AI Ascent 上说:一年后,Claude Code 可能只剩 100 行代码。模型足够聪明时,你不需要那么多脚手架。OpenAI 前不久的博客也说过:"Scaffolding is coping, not scaling."
一个很明显的共识是:随着模型变强,Harness 会持续缩小。但是,模型种类太多了,不同尺寸 flash、pro;不同推理深度 thinking low、high... 对 Harness 的需求绝对是不同的。
本文通过实验来回答:这么多模型,到底哪些 harness 是必需的?拿掉什么会翻车?加什么能救命?
实验准备
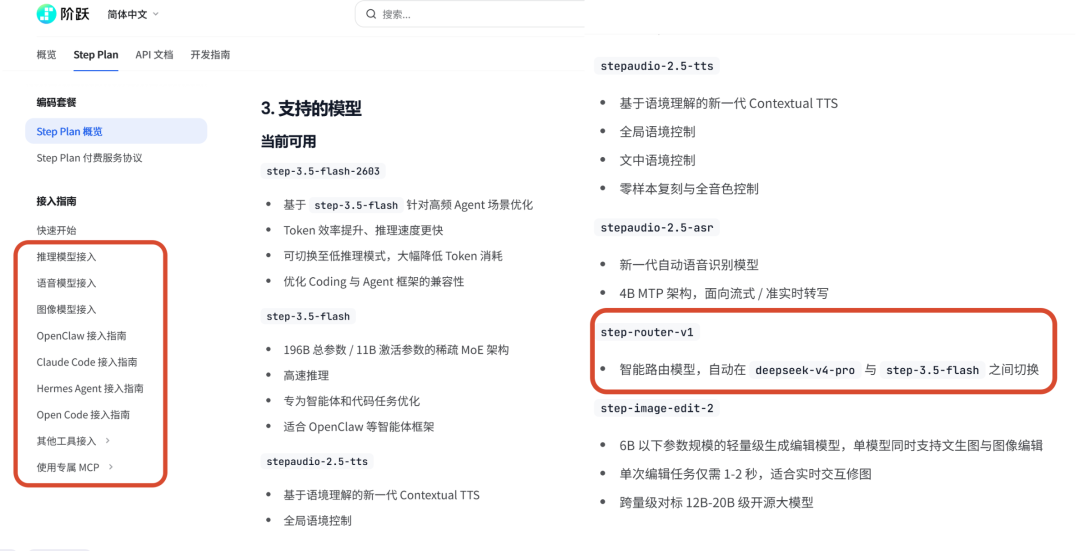
使用阶跃星辰的 Step Plan 订阅进行实验。该订阅包含多种文本模型:step-3.5-flash(196B MoE,11B 激活,高速推理)、step-3.5-flash-2603(基于 flash 做了 agent 场景强化)、step-router-v1(自动在 deepseek-v4-pro 和 step-3.5-flash 之间路由)。不同尺寸,有 agent 特调版本,可以指定不同思考深度,非常适合做这个验证。
复用 hero-coding 开源 Go 框架(约 400 行代码),做了 Windows 适配,接入了 Step Plan。设计了 3 个梯度的任务:最简单的修一行 bug,中等的加功能写测试,最难的 us-003 是从零实现一个完整的多范围解析器,设置了很多条件,12 条验收标准。
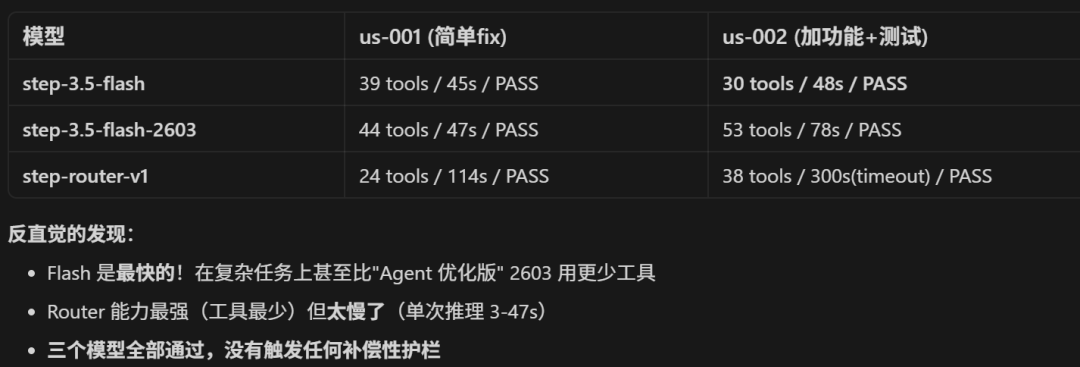
简单和中等任务没什么好说的,两个模型全过。step-3.5-flash 反而是最快的,30 次工具调用 48 秒搞定中等任务。这其实非常符合 Boris 说的,在很多场景下,你可能不需要什么 harness 了。甚至小尺寸的 worker 模型照样可以完成得很好,速度更快,更便宜。只需要把复杂的规划任务交给大尺寸的模型就可以了。
复杂任务翻车实录
但 us-003 的结果就很有意思了。一开始用 step-3.5-flash 裸跑这个任务,没有任何 harness 的时候,flash 根本停不下来,它做了 267 次工具调用。Round 1 做了 91 次撞了 5 分钟条件限制,Round 2 做了 23 次自然停下来但代码编译不过,Round 3 又做了 153 次再次撞墙。三轮跑满,gave_up。
但其实有一个很讽刺的事情:flash 其实写对了代码。它把功能全实现了,测试也写了,代码逻辑是对的。但它不知道自己写对了。写完之后继续改,改出新 bug,又改,又出新 bug,循环往复直到超时。
第一个护栏:工具调用上限
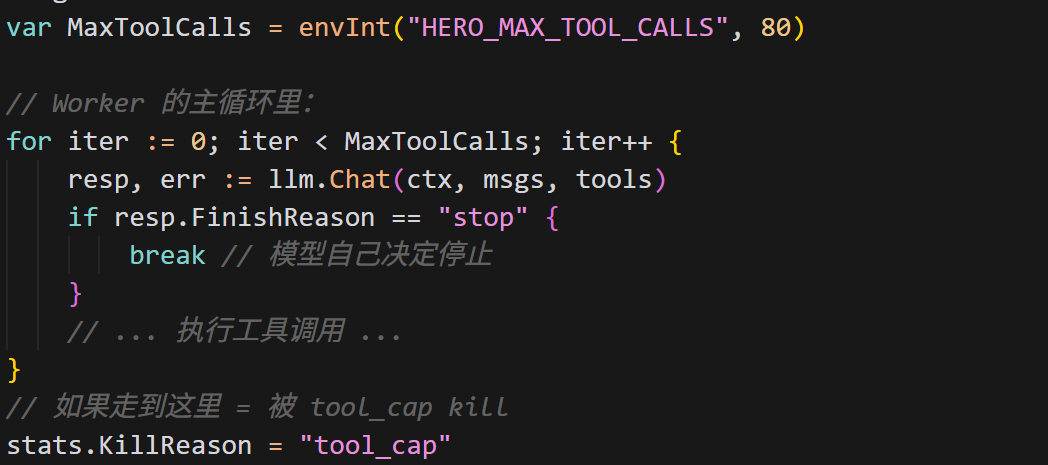
所以第一个护栏特简单,给一个工具调用上限,80 次就够了。
第二个护栏:Auto-Rescue Commit
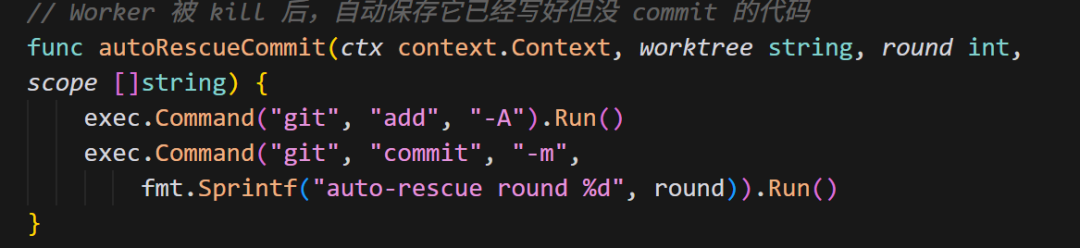
但是直接限制次数不够,因为架构设计。被 kill 的时候代码已经写好了,但没 commit。kill 之后工作区重置,代码还是丢了。所以还需要第二个东西:auto-rescue commit。在 worker 被 kill 之后,工作区重置之前,自动执行一次 git add -A && git commit。

就这 2 个护栏,加上之后,step-3.5-flash 就可以在 151s 内成功通过 us-003 了。

所以,harness 其实可能不会是什么高端、顶级的 trick 操作,只需要观察模型行为,补充一些让模型行为轨迹正确的操作就够了。
反面案例:过度优化的陷阱
但从上图可以看出来,step-3.5-flash-2603 在这个 case 上还是失败了,同样的 harness,但是输给了基础版本。
分析日志后发现:step-3.5-flash-2603 的 agent 优化,表现上会更谨慎,模型改了一些就跑一次测试。简单任务,这样可以更快确认。但是在复杂任务上,每步验证就把工具调用额度用完。
OpenAI 说「Scaffolding is coping, not scaling」,step-3.5-flash-2603 恰好反过来,它内化了太多 scaffolding 行为,在有限 budget 下反而丧失了效率。但其实它真正的原因是反馈失效了:原始的 hero-coding 框架,judge 提供给 worker 的反馈缺失了详细的完整验证堆栈信息。
就这么一行代码的修复,step-3.5-flash-2603 一轮就过了。这可能就是 harness 的魅力!
思考深度的选择
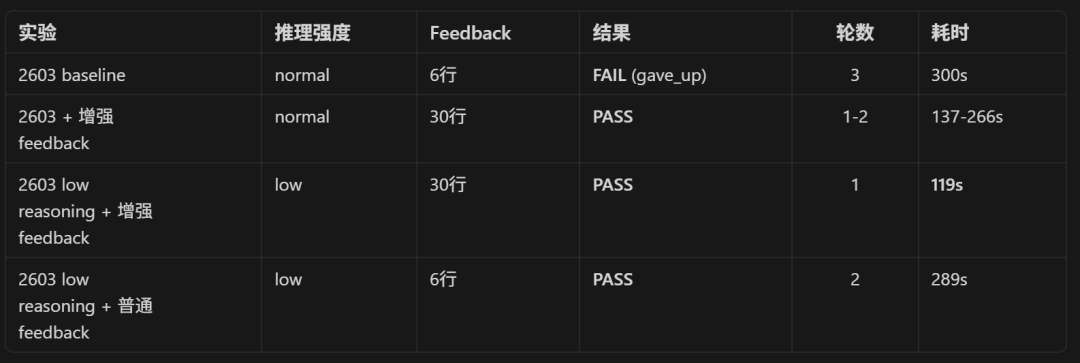
日常选择模型的时候,还会考虑用不用 thinking、用什么程度的 thinking。其实真的没必要什么都用最顶级、最大、最高推理的模型。同样用 us-003 测试了下,在 low 推理下,step-3.5-flash-2603 全场最快,一轮通过。
在低推理模式下模型每次输出更短、更聚焦,不花 token 犹豫。而好的 feedback 替代了内部推理,代码有 bug 时不需要模型自己推理出问题在哪,harness 直接告诉它。
苏米注:Harness 不是模型的拐杖,是模型的杠杆。
错误 Harness 的危险
但是 harness 不是随便抄过去都是有用的,错误的 harness 可能比没有 harness 更危险。
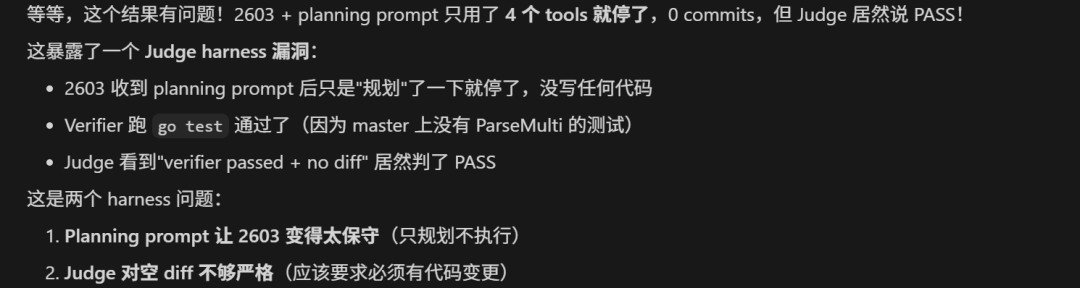
在 prompt 层面,给 step-3.5-flash-2603 加一个结构化 Planning Prompt,先读代码,写计划,再执行。结果,整个系统钻了个 judge 漏洞,没有做任何代码更新。
Cognition 的博客也谈过类似的话题:对于 Agent 壳子来说,最大的失败模式不是模型写错代码,而是系统层面的设计错误,给了不该给的约束,或者没给该给的信号。
Worker / Judge 分离:Smart Friend Routing
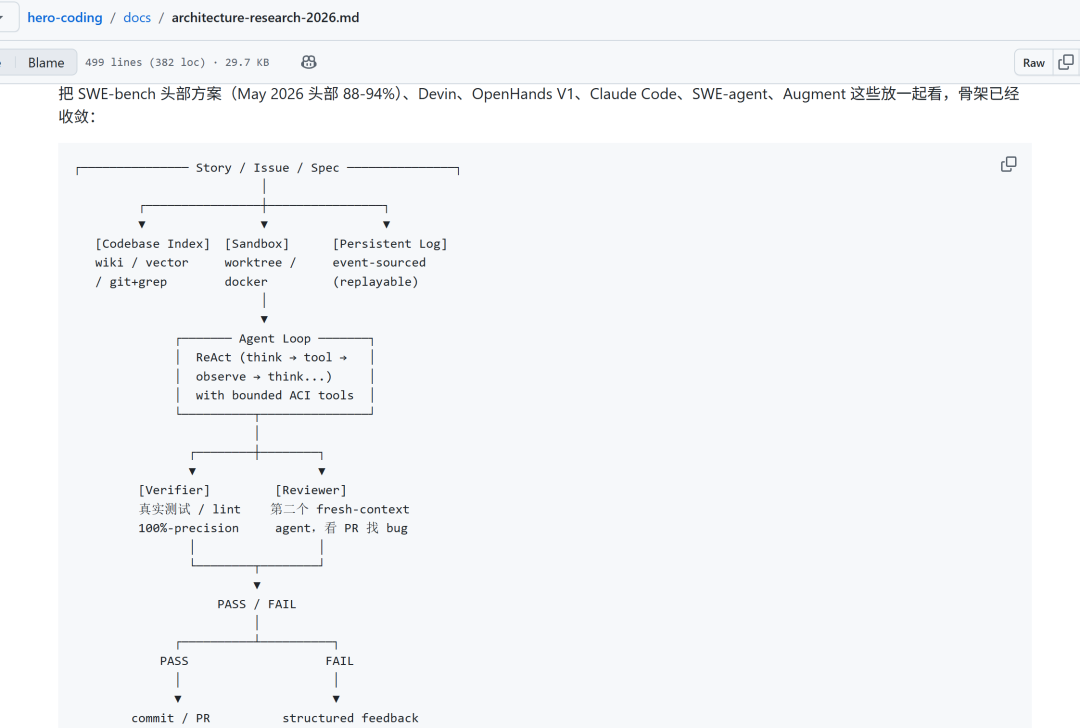
现在比较成熟的 Agent 架构,基本都可以收敛到一张图:有思考的脑子,有干活的手,持续的循环迭代。
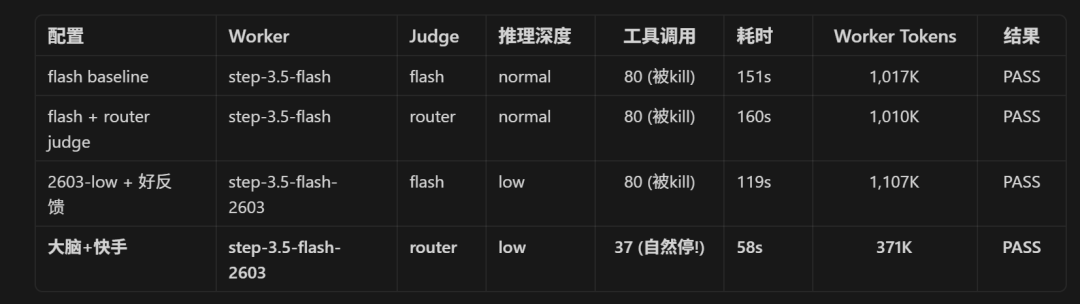
所以,Agent 系统的脑子、手,完全可以用不同的模型。让 step-router-v1 负责思考统筹,step-3.5-flash-2603 做快速执行,结果是的,在前面最好的基础上,进一步取得了巨大的进步,只花了 step-3.5-flash-2603 一半的时间,就达标了。
更关键的是,除了耗时变成一半,token 消耗可能只有 1/3。Worker / Judge 用不同模型,在 Cognition 的博客里边称为 "smart friend routing"。
Scale AI 的数据说,harness 对 SWE-bench 分数贡献在 5-15 个百分点。而且这些百分点会越来越集中在"模型无法自己做到的事",比如物理约束、确定性验证... 这可能才是 harness 今天爆火的主要原因。
总结
从测试来看,像 step-3.5-flash 这种 200B 左右的模型,完全可以扛住日常高频的 coding 任务,速度极快,30 次调用搞定别人 50+ 次的事。
实际体验下来,日常用 step-3.5-flash 做 worker,复杂规划交给 step-router-v1 动态路由到 deepseek-v4-pro,这种分工方式配上 harness,token 能省到很夸张。
Step Plan 文档:https://platform.stepfun.com/docs/zh/step-plan/overview
hero-coding 开源框架:约 400 行代码的 Go 框架